2
Abstract:
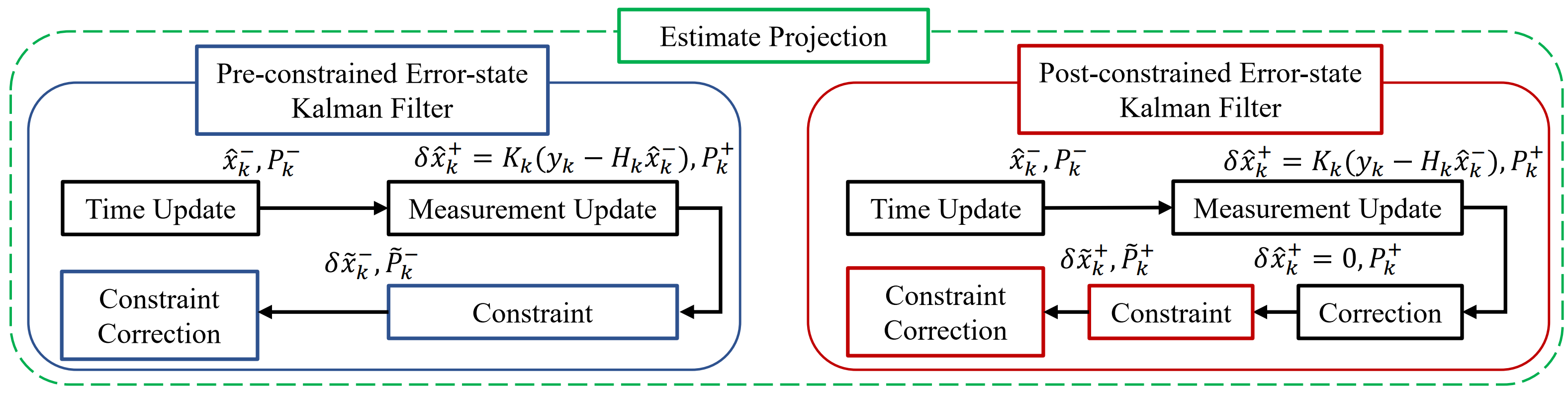
In recent years, the error-state Kalman filter (ErKF) has been widely employed in various applications, including robotics, aerospace, and localization. However, incorporating state constraints into the ErKF framework using the estimate projection method remains ambiguous. This paper examines this issue in depth, specifically exploring whether constraints should be enforced before or after the ErKF correction step. We adopt a mathematical approach, deriving analytical solutions and analyzing their statistical properties. Our findings prove that, for a linear system with linear constraints, both methods yield statistically equivalent results. However, the filter’s behavior becomes uncertain when dealing with linearized constraints. We further identify a special case of a nonlinear constraint where the results of the linear case remain valid. To support our theoretical analysis and evaluate the filter’s performance under non-ideal conditions, we conduct two Monte Carlo simulations considering increasing initialization errors and constraint incompleteness. The simulation results validate our theoretical insights and suggest that applying constraints to the error state after the correction step may lead to superior performance compared to the alternative approach.