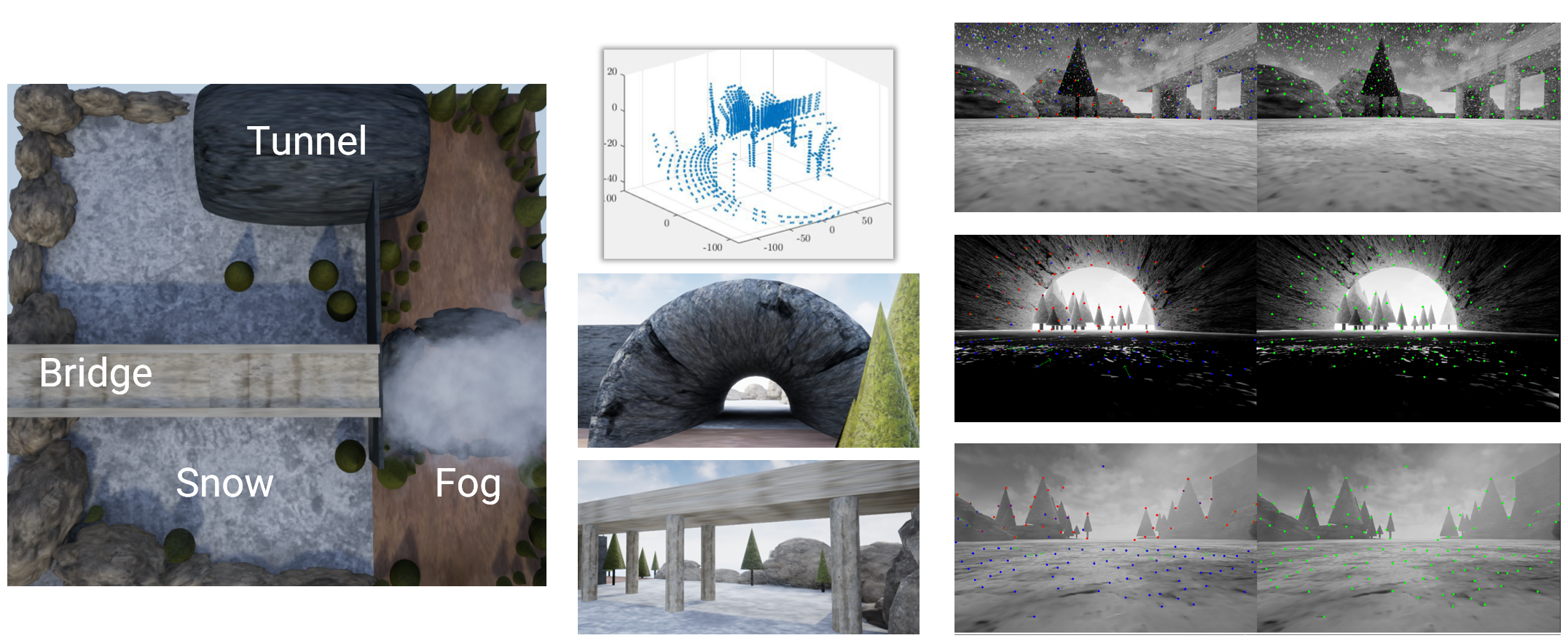
Development of a Harsh Environment Simulator for LiDAR and Camera Hoang Viet DoResearcher, Spatial Information (R&D)PreviousDevelopment of Autonomous Landing for a Quadcopter on Static and Moving Platforms