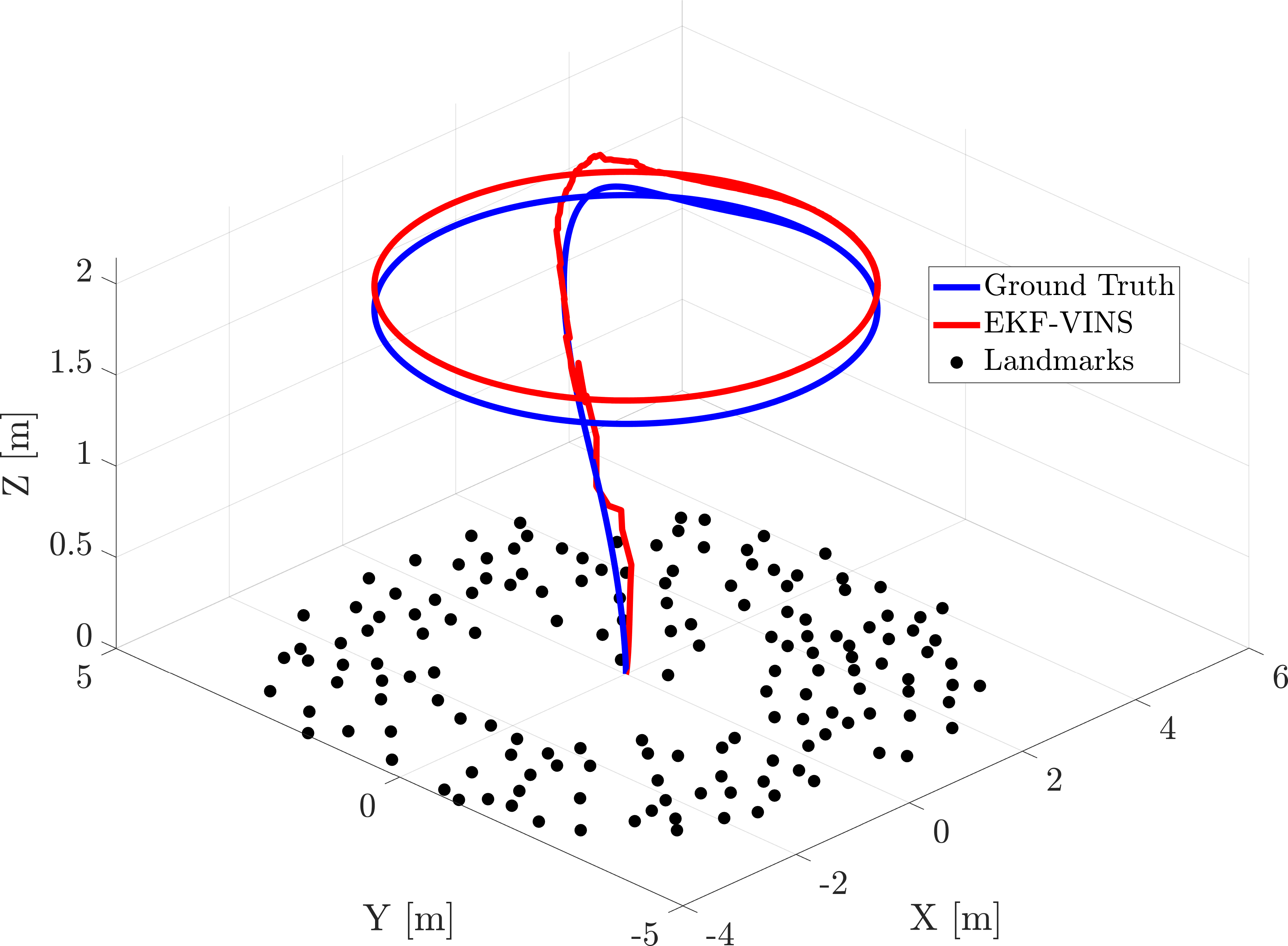
This is a drone simulation written in Matlab. The simulation employs a PID controller to guide a quadcopter along a given smooth trajectory and generate ground truth, IMU data, and monocular camera images using a pinhole model. For instance, we simulate the drone flying in a circular pattern assuming that the camera is oriented downward, capturing randomly generated ground features. The resulting dataset can be utilized to evaluate the performance of a visual-inertial navigation system (VINS).